
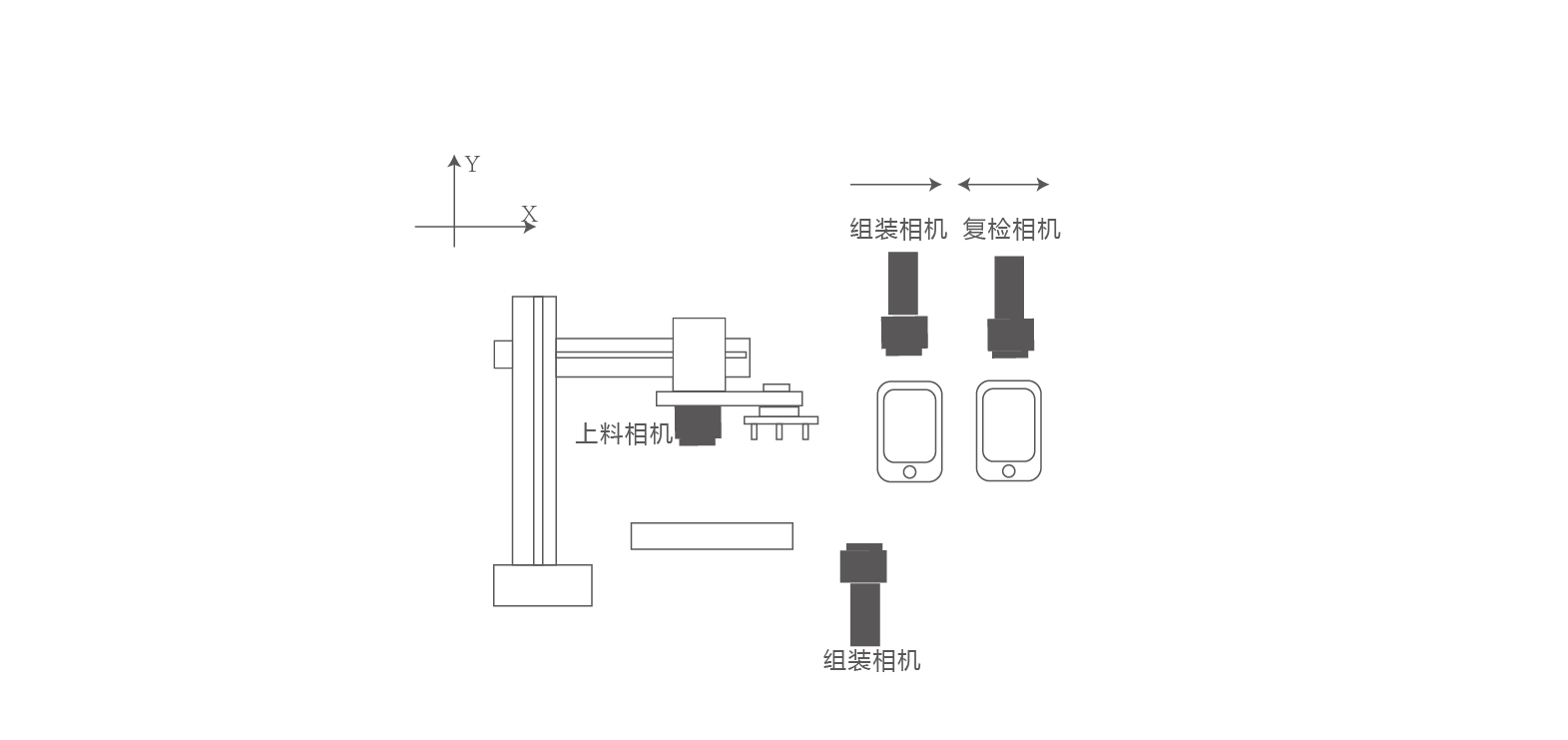
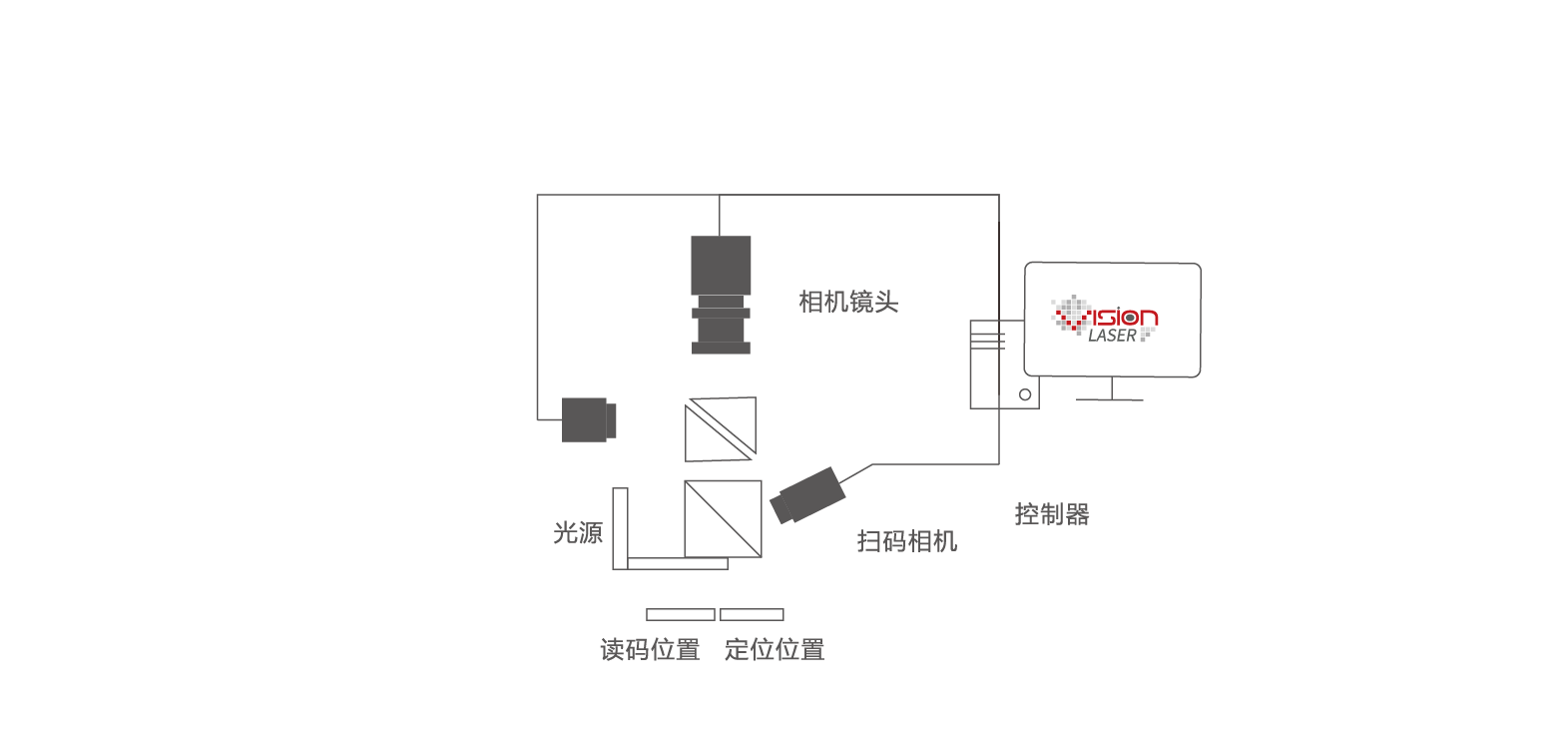
為適應“設備小型化”和“柔性化”的產線升級需求,利用“視覺求精”和“UVW短行程高精控制”技術完成對原有大行程位移控制系統的替代,搭載多相機求精,配合短行程位移帶來的高精度優勢,通過“視覺拍照”和“部件裝貼”兩個位置的統一,使得整個組裝環節的“精度”和“效率”得到成倍提高,通過“實績”表現證明此系統適用于高精度、小型化的部件裝配場景。
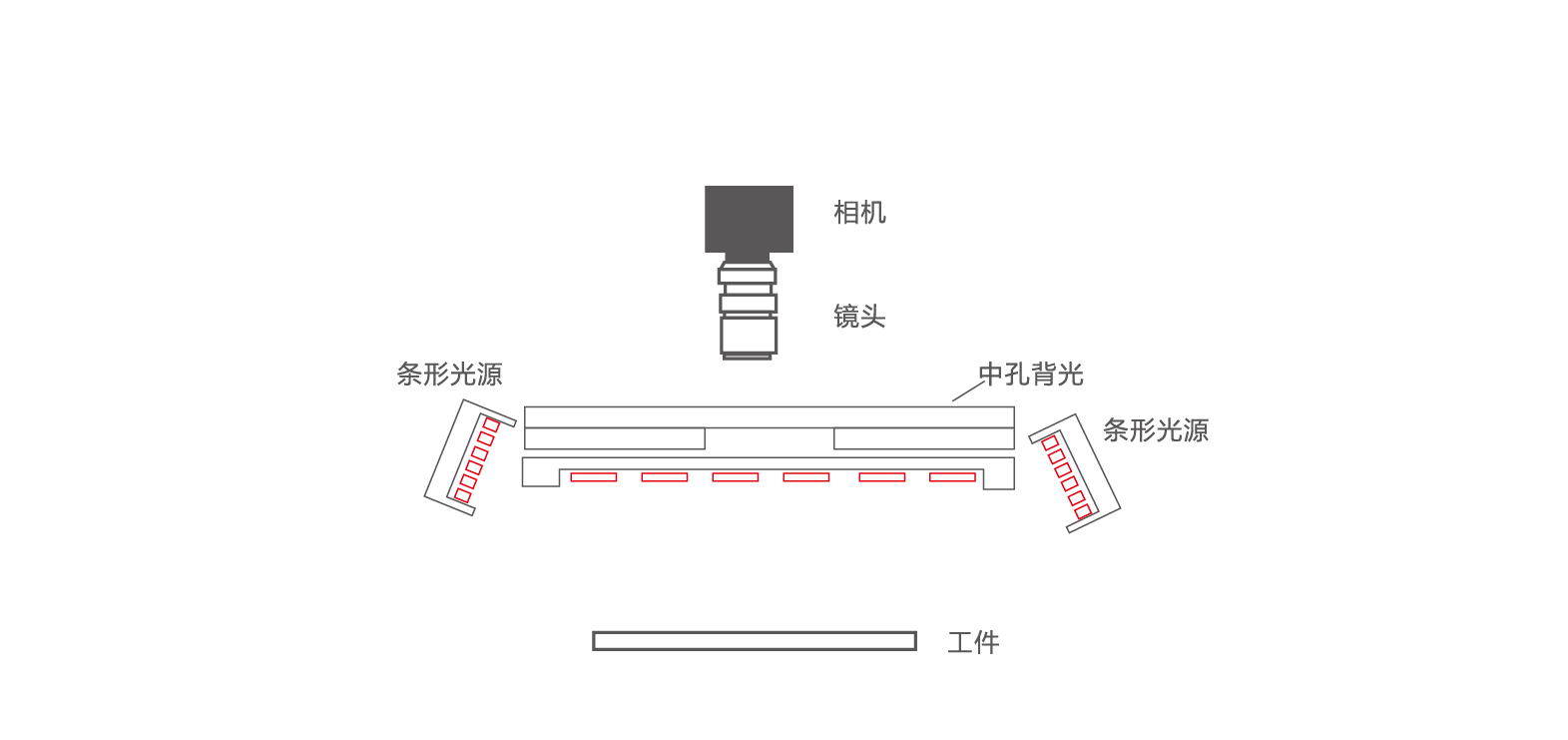
組合光源設計,確保多顆物料同時成像的效果。

運用紅外光源,對膠及毛刺的抑制效果明顯,同時能穿透鍍層,實現高對比度成像。
機器人坐標系建立可以保證單個物料獨立坐標系對位,補償范圍小,精度高,適應性強。
取料→組裝→復檢實現生產過程的全管控,質量流程清晰可見。

為適應“輕薄化”的產品設計趨勢,一些較為特殊、精密的扁平零部件的裝配已從原有傳統的“點膠”“緊固件固定”等方式轉變為“激...
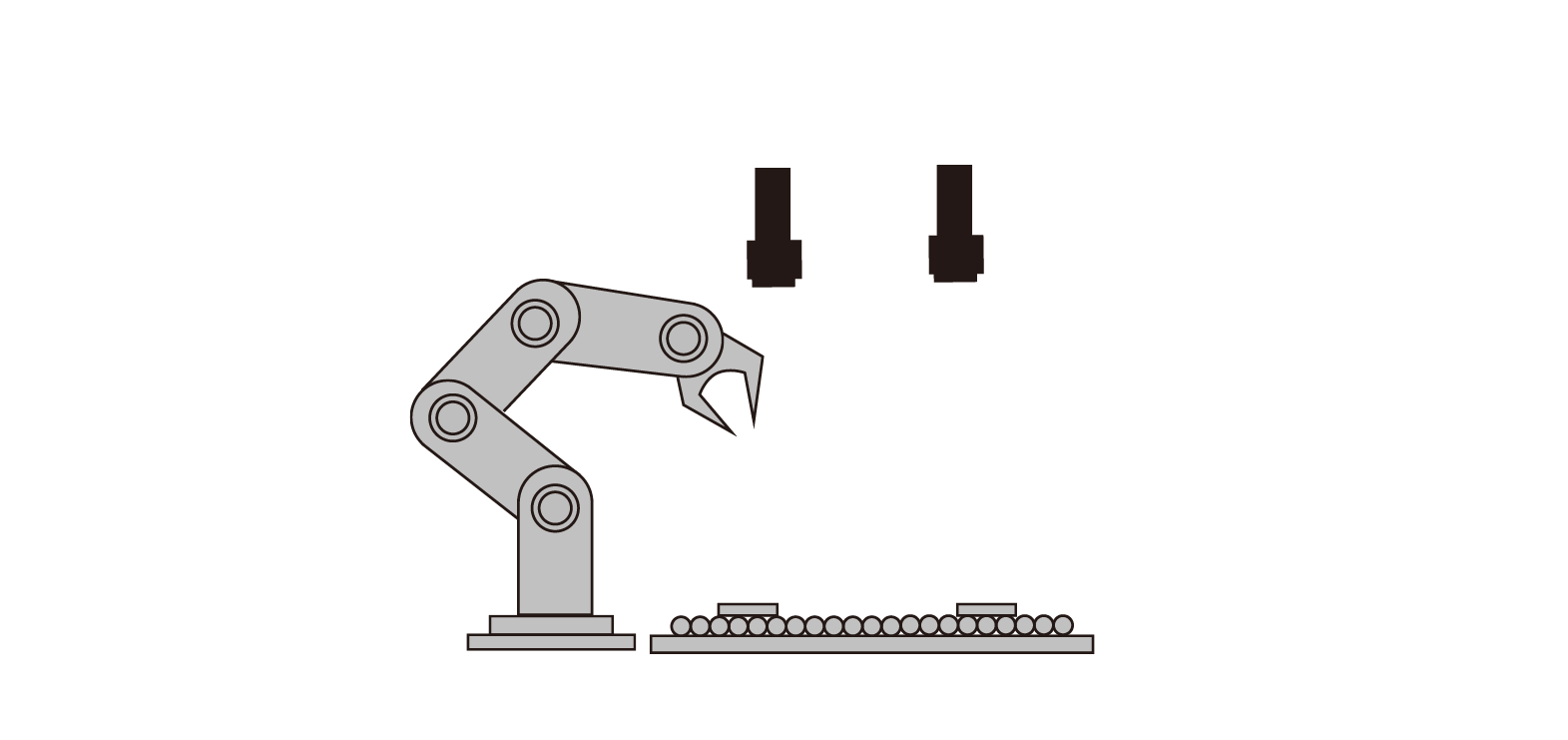
由機械手代替人工完成高精度的電子裝配,并保證高效,不間歇的生產。適用于單目標或Tray盤,專門為各種不同類型機械手執行組...
隨著3C產品越來越緊湊,外觀要求越來越高,特別是蘋果掀起的對產品外觀的超高品質要求,因此對電子產品成品以及不同模組組裝之...
圍繞產品出廠對于外觀品質要求而打造的一套多方位視覺檢測系統,是產品在裝配完成后的一道“屏障”,對在裝配環節中引入的各類型...









